Kosmos-Mikrocontroller Pico-Interface
Kosmos-Mikrocontroller Pico-Interface
Hier wird ein Raspberry Pi Pico als USB-Infrarot-Interface für den
Kosmos Mikrocontroller eingesetzt. Das kann nützlich sein, wenn das
originale IR-Interface nach all den Jahren defekt oder unauffindbar
ist. Außerdem ist das neue Interface klein und kann direkt auf die
Kontaktfedern gesteckt werden. Die Potentialtrennung bleibt erhalten,
wenn man die entsprechenden Kontakte ansonsten nicht verwendet. Und man
kann das USB-Kabel mit einpacken. Deckel zu, und alles bleibt zusammen.
Ich persönlich finde das Arbeiten mit dem Mikrocontroller nun noch
entspannter als mit dem originalen Interface. Die Software-Entwicklung
wurde im Elektronik-Labor genauer beschreiben.
Der RPi Pico ist wesentlich moderner und leistungsfähiger. Macht das
Sinn, einen 32-Bit Controller zum Datenübertragungsknecht für einen
kleinen 8-Bit-Controller zu machen? Ich meine ja, denn der Pico ist
sehr verbreitet und preiswert, während der Kosmos-Mikrocontroller
selten ist und nur noch mit Gold aufzuwiegen. Und das Arbeiten mit den
großen Kontakten und Bauteilen war immer schon sehr entspannt und
zeitsparend. Auch mit dem XN2000 habe ich immer gern gearbeitet. Im
Vergleich dazu ist der Kosmos Mikrocontroller kleiner und kann mit
seinem Klappdeckel leichter verstaut werden.
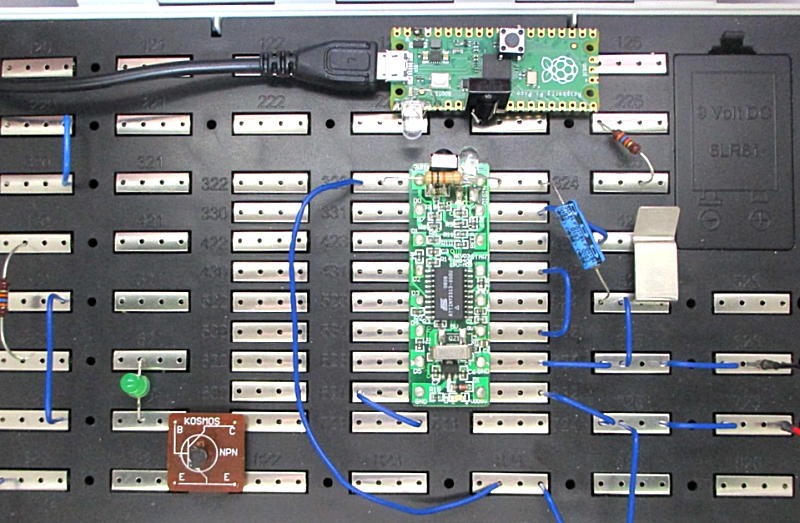
Auf den Pico wird eine IR-Sendediode zwischen GP0 (Kathode) und GP2
(Anode) eingelötet. Zusätzlich braucht man einen integrierten
Infrarotempfänger TSOP31236 an den Pinnen GND (Masse), GP5 (+3,3 V) und
GP8 (Daten). Eine Drahtverbindung muss zwischen GP1 und GP3 gelegt
werden. Und schließlich ist ein Reset-Tastschalter zwischen RUN
und GND nützlich.
Um die Interface-Firmware in den Pico zu laden, hält man die weiße
Boot-Taste gedrückt, während man den Rest-Taster betätigt oder das
USB-Kabel neu einsteckt. Nach dem Loslassen der Boot-Taste erscheint
ein Dateifenster wie bei einem USB-Speicherstick. In dieses kopiert man
die Firmware mit der Endung .UF2. Download: firmware.zip
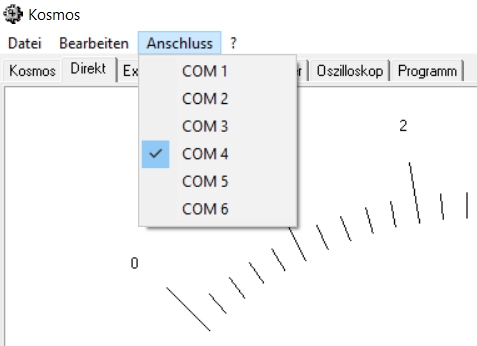
Nach dem erfolgreichen Hochladen muss man zunächst mit dem Windows
Gerätemanager herausfinden, welche COM der Controller belegt. Wenn sie
höher als COM 6 liegt, muss man ihm eine neue COM zuweisen. Hier wurde
COM 4 verwendet. Diese Nummer muss beim ersten Start der
Kosmos-Software eingestellt werden.
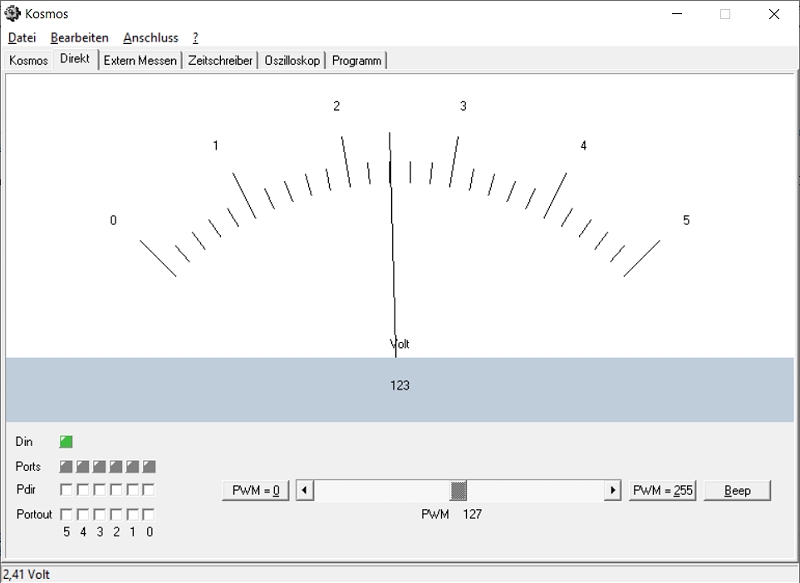
Und nun kann man mit dem Mikrocontroller spielen. Hier habe ich im
Direkt-Menü den PWM-Schieber in die Mitte geschoben, Wer sich das Bild
oben genau ansieht, erkennt, dass das PWM-Signal mit einem
Tiefpassfilter mit 10 kOhm und 10 µF an den AD-Eingang gelegt ist. Die
geglättete Gleichspannung wird gemessen und mit etwa 2,4 V angezeigt.
Wenn man den
Mikrocontroller abschaltet oder die PC-Software beendet, erscheint
wieder das Download-Fenster. Das ist ein unerwünschter Nebeneffekt der
Pico-Firmware und muss nicht weiter beachtet werden. Es reicht, einmal
auf den Reset-Knopf zu drücken oder das USB-Kabel abzuziehen. Damit ist
der Pico bereit für den nächsten Einsatz.