Ein Tiny13-Roboter
Ein Tiny13-Roboter
.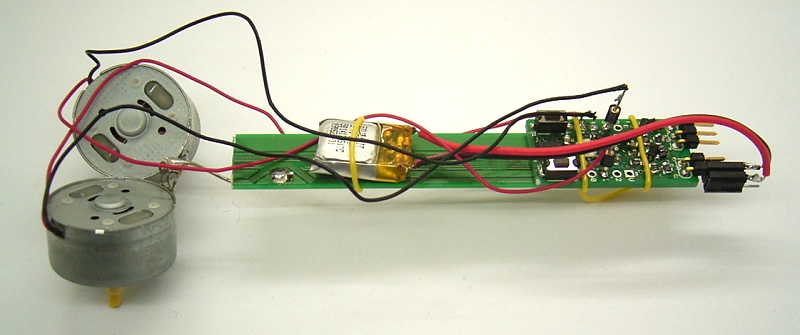
Ein kleiner autonomer Roboter mit dem geringsten Bauteile-Aufwand. Der
Antrieb verwendet zwei DC-Motoren ohne Getriebe. Hinten gibt es eine
Gleitkufe aus isoliertem Draht. Mit an Bord ist ein LiPo-Akku, wie er
in Mini-Hubschraubern verwendet wird. Und alles wird von einem
Mikrocontroller ATtiny13 gesteuert.
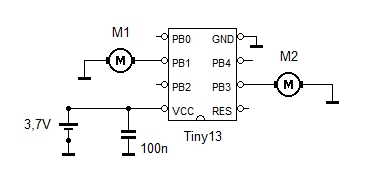
Ganz ohne Motortreiber, ist das denn möglich? Es ist! Und zwar wenn die
Motoren extrem sparsam sind. Hier handelt es sich um Gleichstrommotoren
aus Franzis-Lernpaketen, die in ähnlicher Art auch in
Kassettenrekordern und in manchen CD-Laufwerken zu finden sind. Diese
Motoren sind sehr leichtgängig und haben einen Leerlaufstrom von nur
etwa 10 mA und eine Anlaufspannung von 0,6 V. Das Ohmmeter
zeigt einen Gleichstromwiderstand von 60 Ohm. Ein solcher Motor darf
direkt an einen Port des Mikrocontrollers angeschlossen werden.
Offiziell erlaubt sind laut Datenblatt Ströme bis 40 mA. Bei einer
Batteriespannung von 3,7 V käme man bei stehendem Motor theoretisch
maximal auf ca. 60 mA (bis 80 mA wurden schon ohne Schaden getestet).
In der Praxis beträgt der Motorstrom nur etwa 20 mA.
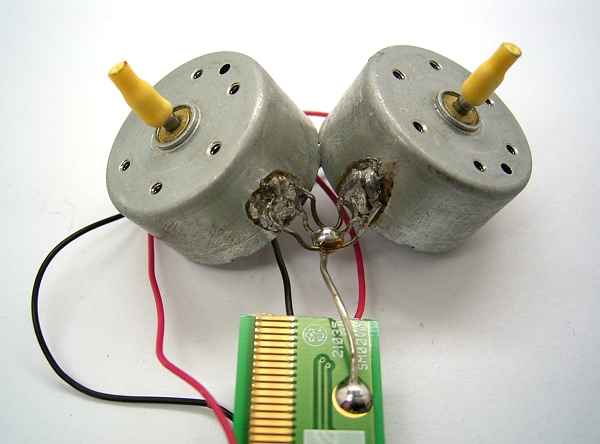
Auf die Achsen der Motoren wurden kurze Abschnitte einer weichen
Kabel-Isolierung geschoben. Das sind nun die Gummiräder des Roboters.
Mit ihrem geringen Durchmesser erhält man eine mittlere Geschwindigkeit
auch bei hoher Drehzahl, sodass die Motoren sehr leicht und
mit wenig Strom laufen. Und das ganz ohne Getriebe und ohne den
üblichen Lärm, den andere Robbis verbreiten. Allerdings ist dieser
Robbi auf einen ebenen Untergrund angewiesen. Die Motoren wurden mit
Draht an die Trägerplatine als Fahrzeug-Chassis gelötet. So kann man
sie leicht ausrichten.
Manch großes Ziel
Erfordert nicht viel.
(Dietrich Drahtlos)
Eigentlich benötigt man nicht mehr als einen einfachen Tiny13 auf einem
Stück Lochrasterplatine. Allerdings muss der Mikrocontroller erst
programmiert werden. Irgendein Programmiergerät braucht man dazu.
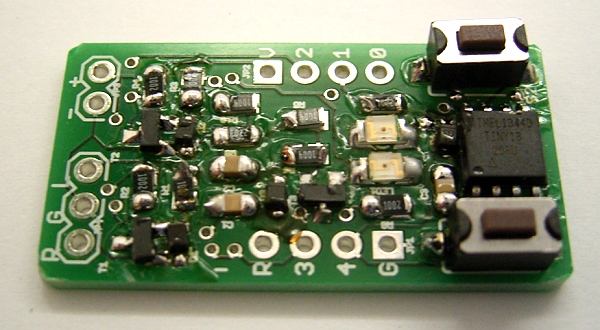
Deshalb wurde der Sparrow
mit seinem integrierten Programmierer verwendet. Da braucht man nicht
mehr als den Kopfhörerausgang eines mobilen Gerätes. Das Stereo-Signal
kommt an R, L und GND, und schon kann die fertige App aufgespielt werden: http://tiny.systems/categorie/cheepit/SparrowBot.html
Das einfache Steuerprogramm wurde in Basom geschrieben. Es bewegt immer
abwechselnd beide Motoren für Geradeauslauf und nur einen Motor für
Kurvenfahrt, unterbrochen jeweils durch kurze Pausen. Jede Phase dauert
eine halbe Sekunde. Insgesamt sieht das dann aus wie ein Roboter-Tanz
auf dem Parkett.
'ATtiny13 Sparrow_Bot1.bas
$regfile = "attiny13.dat"
$crystal = 1200000
$hwstack = 8
$swstack = 4
$framesize = 4
Config Portb = &B000011010
Led1 Alias Portb.1
Led2 Alias Portb.3
Led1 = 0
Led2 = 0
Do
Led1 = 1
Led2 = 1
Waitms 500
Led1 = 0
Led2 = 0
Waitms 500
Led1 = 1
Waitms 500
Led1 = 0
Waitms 500
Loop
End
Home
Labor
Röhren
HF Logbuch Bastelecke